Lecture 17
Gravity and statics
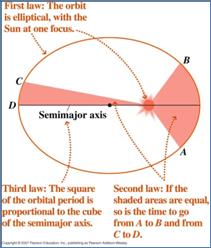
Kepler’s laws
 Kepler’s
superb insights on the data taken on planetary motions made it possible for
Newton to make his landmark contributions. Kepler’s laws are summarized in
this image. Regarding the first law, note that a circular orbit is a special
case of an elliptical orbit. Regarding the second law, note that for a small
displacement
Kepler’s
superb insights on the data taken on planetary motions made it possible for
Newton to make his landmark contributions. Kepler’s laws are summarized in
this image. Regarding the first law, note that a circular orbit is a special
case of an elliptical orbit. Regarding the second law, note that for a small
displacement ![]() from
the position
from
the position ![]() ,
the area swept by the displacement is given by
,
the area swept by the displacement is given by ![]() .
[Why?
The area swept by
.
[Why?
The area swept by ![]() from
from ![]() is the area of the
triangle made by the two vectors
is the area of the
triangle made by the two vectors ![]() and
and ![]() , which is half the
area of the parallogram made by the same. The area of the parallogram is given
by
, which is half the
area of the parallogram made by the same. The area of the parallogram is given
by ![]() .]
Thus,
.]
Thus, ![]() ,
where
,
where ![]() is
the angular momentum (
is
the angular momentum (![]() ).
According to Kepler’s 2nd law,
).
According to Kepler’s 2nd law, ![]() =
constant, and thus,
=
constant, and thus, ![]() is
constant. This and the fact the direction of
is
constant. This and the fact the direction of ![]() is
perpendicular to the plane of motion (left as exercise for readers) means that
is
perpendicular to the plane of motion (left as exercise for readers) means that ![]() is
conserved. In short, Kepler’s 2nd law is, in modern language, the conservation
of the angular momentum. The 3rd law is related to the nature of the force,
and we will derive it in the special case of the circular orbit, below.
is
conserved. In short, Kepler’s 2nd law is, in modern language, the conservation
of the angular momentum. The 3rd law is related to the nature of the force,
and we will derive it in the special case of the circular orbit, below.
Newton’s law of gravitation
According to this law, two masses
(![]() and
and
![]() )
attract each other and the magnitude of the attractive force is given by
)
attract each other and the magnitude of the attractive force is given by
|
|
|
(17.1) |
where ![]() is the distance between the two
masses, and
is the distance between the two
masses, and ![]() is
the constant of universal gravitation
is
the constant of universal gravitation ![]() .
This force is a so-called inverse square law force, since
.
This force is a so-called inverse square law force, since ![]() .
[Later,
it was discovered that the Coulomb force between electric charges also satisfies
the inverse square law.]
.
[Later,
it was discovered that the Coulomb force between electric charges also satisfies
the inverse square law.]
Example
17.1 On the
surface of the Earth, show that the gravitational force on a mass ![]() is
is ![]() with
with ![]() ,
using Earth’s mass and radius. At an altitude of
,
using Earth’s mass and radius. At an altitude of ![]() km
(“geosynchronous orbit”), what is the value of “
km
(“geosynchronous orbit”), what is the value of “![]() ”?
”?
Solution. The gravitational force on a
mass ![]() at
an altitide
at
an altitide ![]() is
given by
is
given by
|
|
|
(17.2) |
![]() here
is the generalization of
here
is the generalization of ![]() that
we have been using throughout this course. For
that
we have been using throughout this course. For ![]() ,
, ![]() ,
using
,
using ![]() kg
and
kg
and ![]() m.
This value turns out to be
m.
This value turns out to be ![]() .
For other values of
.
For other values of ![]() ,
we can simply use, by virtue of the “inverse square law” nature
,
we can simply use, by virtue of the “inverse square law” nature
|
|
|
(17.3) |
So,
at ![]() km
=
km
= ![]() m
= 5.65
m
= 5.65 ![]() .
And, thus,
.
And, thus, ![]() .
.
Force field
Consider
a small mass ![]() pulled
by a very large mass
pulled
by a very large mass ![]() .
If
.
If ![]() ,
then for all practical purposes
,
then for all practical purposes ![]() is
stationary. Let us then take the origin of the coordinate system as the
position of
is
stationary. Let us then take the origin of the coordinate system as the
position of ![]() .
The gravitational force on
.
The gravitational force on ![]() is then given by
is then given by ![]() ,
where
,
where ![]() is
the radial unit vector, a unit length vector whose direction is parallel
to the position vector
is
the radial unit vector, a unit length vector whose direction is parallel
to the position vector ![]() of
mass
of
mass ![]() .
One often talks about
.
One often talks about ![]() being
in a force field
being
in a force field ![]() ,
and thus
,
and thus ![]() experiencing
the force
experiencing
the force ![]() .
The small mass
.
The small mass ![]() is
called a test mass in this context – it is a mass using which we can
detect the force field by
is
called a test mass in this context – it is a mass using which we can
detect the force field by ![]() without disturbing
without disturbing ![]() .
.
Is this apparently very simple manipulation to define a mathematical object – force field – important? If so, why? The answer lies in the importance of “field” in modern physics. To physicists, and perhaps to all laymen too, it is a discomforting thought that two objects can influence each other when they are far from each other. However, if an object is generating a force field, which is then felt by another object, that is a totally different story. [This is the view of the “field theory” in physics, and all modern physics is the field theory in one form or another. From this point of view, “the force is everywhere” and the vacuum is filled with “force particles” that are responsible for force [plus a zoo of other particles]. Often times what modern physicists try to do is to shake the vacuum very hard, with a particle accelerator e.g., to figure out what “the vacuum is really made of.”]
Newton’s shell theorem (symmetry, symmetry, spherical symmetry …)
Consider
a mass distribution, which
depends only on the distance ![]() of the position vector
of the position vector ![]() .
Such a distribution is said to have a “spherical symmetry.” It means that the mass
density does not depend on the direction at all, just like a sphere which looks
the same regardless of the direction in which you look at it. An example. A
simple model of the Earth would be that the mass density = constant (average
mass density = 5.5
.
Such a distribution is said to have a “spherical symmetry.” It means that the mass
density does not depend on the direction at all, just like a sphere which looks
the same regardless of the direction in which you look at it. An example. A
simple model of the Earth would be that the mass density = constant (average
mass density = 5.5 ![]() )
for
)
for ![]() and
0 otherwise. Or, it could be made more realistic by saying that the mass
density
and
0 otherwise. Or, it could be made more realistic by saying that the mass
density ![]() 13
13
![]() at
the core, decreasing to a surface value
at
the core, decreasing to a surface value ![]() 2.2
2.2 ![]() as
as
![]() approaches
approaches
![]() .
In either model, the mass density is spherically symmetric, as long as we
ignore the variation of the mass density as a function of latitude and
longitude.
.
In either model, the mass density is spherically symmetric, as long as we
ignore the variation of the mass density as a function of latitude and
longitude.
Newton’s shell theorem states that the gravitational
force at a position ![]() due
to the presence of a spherically symmetric mass distribution is determined only
by the mass distribution inside the radius
due
to the presence of a spherically symmetric mass distribution is determined only
by the mass distribution inside the radius ![]() .
The mass distribution outside the radius
.
The mass distribution outside the radius ![]() exerts no force, since their
forces exactly cancel out! This is due to the inverse square law. [The
same kind of law for Coulomb force, another inverse square law force, goes by
the name of Gauss’s law.]
More specifically, the force a test-mass
exerts no force, since their
forces exactly cancel out! This is due to the inverse square law. [The
same kind of law for Coulomb force, another inverse square law force, goes by
the name of Gauss’s law.]
More specifically, the force a test-mass ![]() at
at ![]() experiences
due to a spherical mass distribution is given by
experiences
due to a spherical mass distribution is given by
|
|
|
(17.4) |
Example 17.2 Journey through the center of the Earth. Just for fun, let us assume that you can dig a hole through the Earth from North pole to South pole. You will also need Iron Man’s suit, or something like it to withstand all the heat that you will encounter near the core. Anyhow, suppose then you drop into the hole. What kind of motion will you have? How long does it take for you to reach the other side of the Earth? Assume that the density of the Earth is uniform and there is no air resistance.
Solution.
Suppose you are at the radius ![]() (
(![]() )
from the center of the Earth. By Newton’s shell theorem, the gravity that you
feel is determined by the mass of the Earth inside radius
)
from the center of the Earth. By Newton’s shell theorem, the gravity that you
feel is determined by the mass of the Earth inside radius ![]() , which is
, which is ![]() .
So, the force that you feel is
.
So, the force that you feel is ![]() .
This is precisely a Hooke’s law force for a one dimensional motion! So, the
motion that you will experience is a simple harmonic motion! The “spring
constant” in this case is
.
This is precisely a Hooke’s law force for a one dimensional motion! So, the
motion that you will experience is a simple harmonic motion! The “spring
constant” in this case is ![]() ,
and so the angular frequency
,
and so the angular frequency ![]() .
And thus the period
.
And thus the period ![]() .
This is merely 84 minutes. To go from North pole to South pole, it takes only
half of it!
.
This is merely 84 minutes. To go from North pole to South pole, it takes only
half of it!
Motion in gravitational field (“falling” in different styles)
Newton made a remarkable discovery by recognizing, courageously, that an apple falling from a tree is governed by the same law as the Moon going round the Earth. In physics, this type of principle is called the “symmetry principle” – namely the physical law should be valid here and there alike, in the past and in the future alike, in this direction and in that direction alike, and in this reference frame and in that reference frame alike. And so on and so forth. Einstein is the first person who had the courage and insight to put the symmetry principle in front of all other principles, and paved the way to modern physics as we know it.
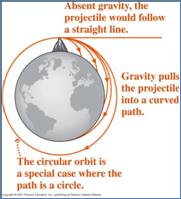 So,
how is it that the apple falling from a tree is governed by the same law as the
Moon going around the Earth? This has to do with different initial conditions.
If initially the object does not have any velocity, it will simply fall in the
radial direction. That would be the apple. However, if the object has the
right speed, moving tangentially, i.e. perpendicular to the radial direction,
then it can do a circular motion. That would be the Moon. See the diagram on
the right.
So,
how is it that the apple falling from a tree is governed by the same law as the
Moon going around the Earth? This has to do with different initial conditions.
If initially the object does not have any velocity, it will simply fall in the
radial direction. That would be the apple. However, if the object has the
right speed, moving tangentially, i.e. perpendicular to the radial direction,
then it can do a circular motion. That would be the Moon. See the diagram on
the right.
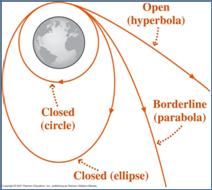
The circular orbit, it turns out, is only one possibility. The following diagram shows all possible shapes of orbitals, if the initial speed is not zero. [In this global view, what we called a “parabola” for a projectile motion turns out to be a small section of an ellipse.]
 Example
17.3 A circular
satellite orbit with the period T = 1 day is called a geosynchronous orbit.
What is the altitude for the geosynchronous orbit of the Earth?
Example
17.3 A circular
satellite orbit with the period T = 1 day is called a geosynchronous orbit.
What is the altitude for the geosynchronous orbit of the Earth?
Solution. The key observation here is
that the centripetal acceleration ![]() is provided by the gravitational
force =
is provided by the gravitational
force = ![]() where
where
![]() is
the orbit-radius and
is
the orbit-radius and ![]() is
the mass of the satellite. Thus we have
is
the mass of the satellite. Thus we have ![]() ,
which means
,
which means ![]() .
This is Kepler’s 3rd law, proved for a circular motion. Now, for
altitude
.
This is Kepler’s 3rd law, proved for a circular motion. Now, for
altitude ![]() ,
we should use
,
we should use ![]() ,
and thus
,
and thus ![]() .
For
.
For ![]() day,
we get
day,
we get ![]() km.
km.
Gravitational potential energy
For the given force ![]() ,
what is the potential energy funnction? The answer:
,
what is the potential energy funnction? The answer:
|
|
|
(17.5) |
Why?
Because ![]() .
The existence of
.
The existence of ![]() means
that the gravitational force is conservative.
means
that the gravitational force is conservative.
The conservation of total mechanical energy in a gravitational field
|
|
|
(17.6) |
It
should be noted that here ![]() ,
where
,
where ![]() is
in general a three dimensional vector. [Although for any
orbits that we considered above, a two dimensional vector would suffice.]
is
in general a three dimensional vector. [Although for any
orbits that we considered above, a two dimensional vector would suffice.]
Escape speed
What
goes up may not come down! If the total mechanical energy is zero, then from
the above equation, it can be seen that at ![]() the kinetic energy is 0. This
is the minimum condition for an object to escape the gravitational field. For
this reason, the escape speed,
the kinetic energy is 0. This
is the minimum condition for an object to escape the gravitational field. For
this reason, the escape speed, ![]() ,
at
,
at ![]() is
defined as the speed for which
is
defined as the speed for which ![]() .
Thus,
.
Thus, ![]() ,
which means
,
which means ![]() .
For the Earth gravity, the escape speed at the surface of the Earth = 11.2 km/s
(i.e. 22 thousand mph).
.
For the Earth gravity, the escape speed at the surface of the Earth = 11.2 km/s
(i.e. 22 thousand mph).
Binding energy
Suppose
that an object is orbiting in a gravitational field with energy ![]() . Then,
. Then, ![]() is its binding energy.
That is, if the object gains that binding energy somehow, it will be able to
escape the gravitational field! The states with energy
is its binding energy.
That is, if the object gains that binding energy somehow, it will be able to
escape the gravitational field! The states with energy ![]() are called “bound states.”
[The
notion of binding energy or bound states is more commonly used in atomic
systems, whose quantum mechanical problem of charge in a Coulomb field quite
resembles the current problem of mass in a gravitational field.]
are called “bound states.”
[The
notion of binding energy or bound states is more commonly used in atomic
systems, whose quantum mechanical problem of charge in a Coulomb field quite
resembles the current problem of mass in a gravitational field.]
Circular motion in a gravitational field
For a circular motion of mass ![]() , in a gravitational field due to
a much larger mass
, in a gravitational field due to
a much larger mass ![]() ,
some simple useful relations can be derived.
,
some simple useful relations can be derived. ![]() (Kepler’s
third law) is one of them (proved in the Example 17.3). There are additional
ones. Note that for a circular motion, the potential energy
(Kepler’s
third law) is one of them (proved in the Example 17.3). There are additional
ones. Note that for a circular motion, the potential energy ![]() is
constant, since
is
constant, since ![]() is
constant. Since the total mechanical energy
is
constant. Since the total mechanical energy ![]() is constant, it then follows
that
is constant, it then follows
that ![]() is
constant. That is, a circular motion in a gravitational field is necessarily
a uniform circular motion. Now, consider the centripetal force, which comes
from the gravitational force:
is
constant. That is, a circular motion in a gravitational field is necessarily
a uniform circular motion. Now, consider the centripetal force, which comes
from the gravitational force: ![]() .
Multiplying both sides by
.
Multiplying both sides by ![]() , we get
, we get ![]() .
Namely,
.
Namely, ![]() .
Therefore, for a circular motion in a gravitational field, we have
.
Therefore, for a circular motion in a gravitational field, we have
|
|
|
(17.7) |
That is, any object doing a circular motion in a gravitational field is in a bound state. Namely, they can’t escape the gravitational field, unless some energy is delivered to it from outside.
Example 17.4 Express the velocity of a mass ![]() , that is doing a circular motion
in a gravitational force field by a large mass
, that is doing a circular motion
in a gravitational force field by a large mass ![]() , as a function of
, as a function of ![]() and other parameters.
and other parameters.
Solution. We just showed that ![]() ,
which means
,
which means ![]() .
This may seem a bit paradoxical. Namely, as
.
This may seem a bit paradoxical. Namely, as ![]() increases, the speed decreases,
while
increases, the speed decreases,
while ![]() increases!
increases!
Example 17.5 Shuttle orbit change paradox. You are in charge of a space shuttle orbiting the Earth in a circle. You want to increase its energy so that it goes into a circular orbit with a greater radius. You fire the jet engine once (for a very short time), wait for a set time, and fire the engine again. Each time you fire the jet engine to give a forward thrust: the momentum and thus the kinetic energy of the satellite increase each time. And yet, the kinetic energy of the final circular orbit is actually lower than the kinetic energy of the initial circular orbit, as follows from the previous example. Solve this apparent paradox.
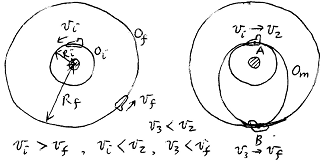 Solution.
Suppose the initial circular orbit,
Solution.
Suppose the initial circular orbit, ![]() ,
has the radius
,
has the radius ![]() and
the speed
and
the speed ![]() and
the final circular orbit,
and
the final circular orbit, ![]() ,
has the radius
,
has the radius ![]() and
the speed
and
the speed ![]() .
From the previous example,
.
From the previous example, ![]() ,
and so the kinetic energy must decrease, going from
,
and so the kinetic energy must decrease, going from ![]() to
to
![]() .
How can this happen when all you do is to increase the kinetic energy by
forward thrusts? The answer lies in how you go from
.
How can this happen when all you do is to increase the kinetic energy by
forward thrusts? The answer lies in how you go from ![]() to
to
![]() .
You have to go through an intermediate orbit, e.g.
.
You have to go through an intermediate orbit, e.g. ![]() in
the diagram. You can do the following maneuvers. First, fire the jet engine quickly
at point A of the orbit so that the orbit becomes
in
the diagram. You can do the following maneuvers. First, fire the jet engine quickly
at point A of the orbit so that the orbit becomes ![]() ,
an ellipse. The amount (
,
an ellipse. The amount (![]() )
and the time duration (
)
and the time duration (![]() )
of the forward thrust determines the new speed
)
of the forward thrust determines the new speed ![]() ,
through
,
through ![]() (forward thrust: both momentum and kinetic energy increase). Here,
(forward thrust: both momentum and kinetic energy increase). Here, ![]() should
be short enough so that the shuttle is basically at point A while the thrust is
being applied. You apply the exact amount of impulse so that
should
be short enough so that the shuttle is basically at point A while the thrust is
being applied. You apply the exact amount of impulse so that ![]() is
an orbit that is tangential to both
is
an orbit that is tangential to both ![]() and
and
![]() :
the closest point (the perigee) occurs at point A, which touches
:
the closest point (the perigee) occurs at point A, which touches ![]() ,
and the farthest point (the apogee) occurs at point B, which touches
,
and the farthest point (the apogee) occurs at point B, which touches ![]() .
Second, wait until the shuttle comes to point B, where your space shuttle’s
speed is now
.
Second, wait until the shuttle comes to point B, where your space shuttle’s
speed is now ![]() .
This inequality, which you can understand from Kepler’s 2nd law, is the most
important piece for solving the puzzle here. Third, fire your jet engine at
point B, so that the speed increases from
.
This inequality, which you can understand from Kepler’s 2nd law, is the most
important piece for solving the puzzle here. Third, fire your jet engine at
point B, so that the speed increases from ![]() to
to
![]() .
In these maneuvers, the difference
.
In these maneuvers, the difference ![]() is
greater than the combined increase in speed
is
greater than the combined increase in speed ![]() and
and
![]() ,
and so the space shuttle has no trouble satisfying
,
and so the space shuttle has no trouble satisfying ![]() .
.
Quantitatively,
here is how it goes. The exact values of ![]() and
and
![]() can
be solved for, using
can
be solved for, using ![]() (Kepler’s
2nd law) and the energy conservation equation (with
(Kepler’s
2nd law) and the energy conservation equation (with ![]() cancelled out)
cancelled out) ![]() .
The result:
.
The result: ![]() and
and
![]() .
.
Statics
Statics is related to the load and the stability of, typically large, objects such as buildings, bridges, statues, etc. One can recognize why the topic of statics is very important in practice. As we will see, the principle of statics is very simple. This, by the way, does not mean that problems in statics are simple; they are in general quite interesting, and you should try some problems in the back of Chapter 12 (like 39, 56, e.g., but only if you have time!).
Statics is a subject dealing with static equilibrium. What is static equilibrium? It means that everything is at rest (static) and everything is at equilibrium (no net force). From this definition, note that as long as a body is in static equilibrium we can consider it a rigid body. Therefore, for a body in static equilibrium, the following conditions must necessarily hold.
|
|
Net external force = zero, Net external torque around any point = zero. |
(17.8) |
The
first condition ensures that the center of mass of the body, once at rest, will
remain at rest, according to Eq. (16.3). For the second condition, recall that
the only internal motion that a rigid body can have is rotation around the
center of mass (Eq. (14.10); also see Eq. (14.4)). So, a rigid body in static
equilibrium must have no net external torque around the center of mass.
However, this condition can be made much more general, as stated above.
Namely, it turns out that in static equilibrium, the net external torque is zero
around any point. Physically, this means that there is no rotation
around any point. This is because, if ![]() ,
where the sum is over all external forces
,
where the sum is over all external forces ![]() ,
then we can prove the following: if the net external torque is zero around one
point (like, but not necessarily, the center of mass) then the net external
torque is zero around any point. [Proof: Call the first
point
,
then we can prove the following: if the net external torque is zero around one
point (like, but not necessarily, the center of mass) then the net external
torque is zero around any point. [Proof: Call the first
point ![]() , and the second
(arbitrary) point
, and the second
(arbitrary) point ![]() . Define the position
vector of
. Define the position
vector of ![]() as
as ![]() when referenced to
point
when referenced to
point ![]() , and
, and ![]() when referenced to
point
when referenced to
point ![]() . Then,
. Then, ![]() , where
, where ![]() is the vector from
is the vector from ![]() to
to
![]() . So, if
. So, if ![]() , then we get
, then we get ![]() , where in the last
step
, where in the last
step ![]() is used. QED.]
is used. QED.]
This last point is of great importance in doing problems of statics. To set up the equation for the total external torque, one can pick any point around which to calculate the torque. If one establishes that the torque is zero around that point, then one has proven that the torque is zero around any other point, as long as the net eternal force is also zero. Then it should become obvious that the choice of the point around which the torque is calculated should be made so that the calculation is the least complicated!
One
note about center of gravity and center of mass. As is obvious
from the above discussion and, more fundamentally, the definition of the torque
(![]() ),
it is important to know where the external force is applied, since the position
at which the force is applied is crucial for the calculation of the torque. This
leads to the concept of the center of force, such as the center of
gravity, the position at which the net gravity is applied. In general, the
center of gravity is different from the center of mass. For non-uniform
gravitational field, such as the Moon experiences of the Earth, the center of
gravity of the Moon is closer to the Earth than the center of mass of the Moon,
due to the inverse square law nature of the force. However, for a uniform
gravitational field, approximately valid near the surface of the Earth, the
center of gravity is identical with the center of mass.
),
it is important to know where the external force is applied, since the position
at which the force is applied is crucial for the calculation of the torque. This
leads to the concept of the center of force, such as the center of
gravity, the position at which the net gravity is applied. In general, the
center of gravity is different from the center of mass. For non-uniform
gravitational field, such as the Moon experiences of the Earth, the center of
gravity of the Moon is closer to the Earth than the center of mass of the Moon,
due to the inverse square law nature of the force. However, for a uniform
gravitational field, approximately valid near the surface of the Earth, the
center of gravity is identical with the center of mass.
Example 17.6 An object is resting on a table. Suppose that the contact area, A, between the object and the table consist of only one simple totally convex shape: this means the normal force by the table on the object is applied at some point, Q, which is within, or on the boundary of, A. Q = center of normal force. Consider point P, the intersection point between the table and the vertical line dropped down from the center of mass of the object. Show that for the object to be in static equilibrium, P should be contained within, or on the boundary of, A. Also, show that Q = P.
Solution. Suppose P lies outside A. Then Q and P are distinct. Choose any point between Q and P, like the midpoint, and call it R. First notice that for this object to be in static equilibrium, the normal force and the gravity should sum up to zero force. This leads to the familiar result: the normal force should point up while the gravity points down. However, this means that, around point R, the torques due to the normal force and the gravity are in the same direction! They both tend to topple the object. So, if P is outside A, then there cannot be any static equilibrium. Conversely, for the object to be in static equilibrium, P should lie within, or on the boundary of, A. Furthermore, it follows that the center of normal force, Q, must coincide with P, because only then the total external torque can be zero.
Got it? 12.1-3 and Example 12.2 are essential to understand.
– FIN – Viva compassion, viva curiosity!