Lecture 15
Simple Harmonic Motion
The simple harmonic motion is very important. Recall that a particle around any stable equilibrium experiences a restoring force, and thus stays around that stable equilibrium point. In this lecture, we will see that the resulting motion is a simple harmonic motion, as long as the deviation from the stable equilibrium point is small and assuming that there is no other force (e.g. friction) involved.
Let us be a bit more
mathematical. Consider a stable equilibrium point at a certain value of ![]() . In general, we can take that certain
value of
. In general, we can take that certain
value of ![]() to
be zero, simply by shifting the
to
be zero, simply by shifting the ![]() coordinate
system, and so let us do that. So we are now considering a stable
equilibrium point at
coordinate
system, and so let us do that. So we are now considering a stable
equilibrium point at ![]() .
Then, the potential function
.
Then, the potential function ![]() must
satisfy
must
satisfy ![]() and
and
![]() ,
the first since
,
the first since ![]() is
the equilibrium point, and the second since
is
the equilibrium point, and the second since ![]() is the stable equilibrium
point, i.e.
is the stable equilibrium
point, i.e. ![]() is
a local minimum at
is
a local minimum at ![]() .
Recall from calculus that
.
Recall from calculus that ![]() .
For small
.
For small ![]() ,
we can ignore the higher order terms. Also, noting that
,
we can ignore the higher order terms. Also, noting that ![]() and
and
![]() ,
and defining
,
and defining ![]() ,
we get
,
we get
|
|
|
(15.1) |
|
|
|
(15.2) |
So, around any stable
equilibrium, Hooke's law applies! The above potential ![]() is called a simple harmonic
potential well. In this lecture, we will consider situations in which the
Hooke's law force for
is called a simple harmonic
potential well. In this lecture, we will consider situations in which the
Hooke's law force for ![]() is
the only force (however, see comments at the end of this LN), then
is
the only force (however, see comments at the end of this LN), then ![]() .
Namely, we have
.
Namely, we have ![]() ,
an equation of motion for us to solve. It is customary to define
,
an equation of motion for us to solve. It is customary to define
|
|
|
(15.3) |
then, the equation of motion becomes
|
|
|
(15.4) |
What is the solution for this? The general solution is
|
|
|
(15.5) |
Some points to note about this solution.
1)
How do we
know that Eq. (15.5) is the general solution of Eq. (15.4)? Strictly speaking, it is from
the theory of differential equations in mathematics. [There
are many other ways to write down this solution, the most elegant way is
perhaps using the complex numbers as in ![]() .]
Here is a bit of justification. Notice that the LHS of Eq. (15.4) is the 2nd derivative of
.]
Here is a bit of justification. Notice that the LHS of Eq. (15.4) is the 2nd derivative of ![]() with respect to
with respect to ![]() . This means that one expects
two “integration constants” to appear in the solution. Indeed, we have two
symbols
. This means that one expects
two “integration constants” to appear in the solution. Indeed, we have two
symbols ![]() and
and
![]() ,
which did not exist in the original equation (15.4). This is the correct behavior,
and indeed
,
which did not exist in the original equation (15.4). This is the correct behavior,
and indeed ![]() and
and
![]() are
just (integration) constants. Next, the 2nd derivative of (15.5) does give
are
just (integration) constants. Next, the 2nd derivative of (15.5) does give ![]() ,
satisfying (15.4). Let us see this step by step.
,
satisfying (15.4). Let us see this step by step.
![]() [
[![]() ,
and the chain rule used here]
,
and the chain rule used here] ![]() .
Taking the derivative one more time,
.
Taking the derivative one more time, ![]() [
[![]() ,
and the chain rule used here]
,
and the chain rule used here] ![]() !
!
2) A few simple problems in classical mechanics are exactly solvable. We have seen two examples already – the constant acceleration problem (“projectile motion”) and the constant centripetal acceleration problem (“uniform circular motion”). The simple harmonic motion is our third example.
3)
![]() is
the amplitude. It is taken to be a positive number, by convention.
is
the amplitude. It is taken to be a positive number, by convention.
4)
![]() is
the phase constant. The entire argument of the cosine function,
is
the phase constant. The entire argument of the cosine function, ![]() , is called the phase.
, is called the phase.
5)
![]() is
the angular frequency, with the SI unit of Hz (hertz) = 1/sec. Since
is
the angular frequency, with the SI unit of Hz (hertz) = 1/sec. Since ![]() is dimensionless (any argument of
sine or cosine is dimensionless, since the angle is a dimensionless quantity), the
SI unit of
is dimensionless (any argument of
sine or cosine is dimensionless, since the angle is a dimensionless quantity), the
SI unit of ![]() should
be 1/sec. It is instructive to also check this using Eq. (15.3). Note that the SI unit of the
spring constant
should
be 1/sec. It is instructive to also check this using Eq. (15.3). Note that the SI unit of the
spring constant ![]() is
N/m =
is
N/m = ![]() .
Thus the SI unit of
.
Thus the SI unit of ![]() is
is
![]() .
Thus, it follows that the SI unit of
.
Thus, it follows that the SI unit of ![]() is
1/sec.
is
1/sec.
6)
![]() is
independent of
is
independent of ![]() and
and
![]() .
.
Frequency and period
For any
periodic motion, not just for the simple harmonic motion, the following
relation applies to the angular frequency (![]() ; omega not w), the frequency (
; omega not w), the frequency (![]() ; nu not v), and the period (
; nu not v), and the period (![]() ),
),
|
|
|
(15.6) |
 Both
Both ![]() and
and ![]() are widely used. Using symbol
are widely used. Using symbol ![]() or explicitly saying “angular
frequency” usually removes the ambiguity of which frequency is being
discussed. Another commonly used symbol in place of
or explicitly saying “angular
frequency” usually removes the ambiguity of which frequency is being
discussed. Another commonly used symbol in place of ![]() is f.
is f.
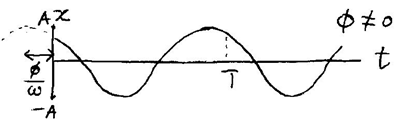
The
period (![]() )
is defined as the time interval to complete one cycle of the motion. The one
cycle corresponds to the change of ange by
)
is defined as the time interval to complete one cycle of the motion. The one
cycle corresponds to the change of ange by ![]() for the cosine function. Above,
for the cosine function. Above,
![]() is
shown with
is
shown with ![]() and
a general value.
and
a general value.
Meaning of the simple harmonic motion
The
meaning of the simple harmonic motion seems simple enough. Consider a
frictionless surface on which a mass lies. The mass is connected to a
spring. Imagine that you pull a mass connected to a spring by a certain
distance ![]() ,
and then just release it. Then, the mass will be pulled by the spring and
,
and then just release it. Then, the mass will be pulled by the spring and ![]()
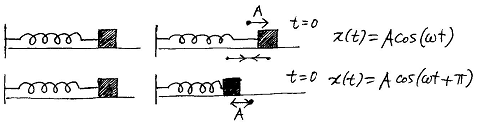 will decrease all the way to
will decrease all the way to ![]() and then come back to
and then come back to ![]() and so on and so forth.
According to Eq. (15.5), the motion of the mass from
then on is completely described by the equation
and so on and so forth.
According to Eq. (15.5), the motion of the mass from
then on is completely described by the equation ![]() .
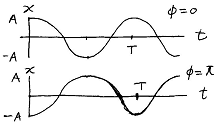
The reason why
.
The reason why ![]() (modulo
2
(modulo
2![]() )
is because only then
)
is because only then ![]() will
have a maximum at
will
have a maximum at ![]() .
Suppose that you instead push the spring by the distance
.
Suppose that you instead push the spring by the distance ![]() , and then release it. In this
case,
, and then release it. In this
case, ![]() .
.
Now, notice that the relation ![]() is exactly like that of the
uniform circular motion. What does the simple harmonic motion have to do with
the uniform circular motion? A lot! If you allow the circular motion to be a
virtual one. For the mass on spring problem, imagine a virtual world
where the same mass is connected to the same spring (or just a string), but
this time making a uniform circular motion with the radius
is exactly like that of the
uniform circular motion. What does the simple harmonic motion have to do with
the uniform circular motion? A lot! If you allow the circular motion to be a
virtual one. For the mass on spring problem, imagine a virtual world
where the same mass is connected to the same spring (or just a string), but
this time making a uniform circular motion with the radius ![]() , angular velocity
, angular velocity ![]() (> 0 for a CCW motion, which
is what we consider here), and the initial angle
(> 0 for a CCW motion, which
is what we consider here), and the initial angle ![]() (measured from the
(measured from the ![]() axis). The following table
applies. UCM = uniform circular motion, SHM = simple harmonic motion.
axis). The following table
applies. UCM = uniform circular motion, SHM = simple harmonic motion.
|
|
UCM in the virtual plane |
SHM in the real space |
|
Dimensionality |
Two dimensional motion |
One dimensional motion |
|
Coordinates |
|
|
|
|
Initial angle; initial phase |
Initial phase; phase constant |
|
|
Angle
at time |
Phase
at time |
|
|
Angular velocity |
Angular frequency |
|
|
Period |
Period |
|
|
Radius |
Amplitude |
|
Force |
Constant; Centripetal force |
Varying
( |
|
|
|
The actual spring force |
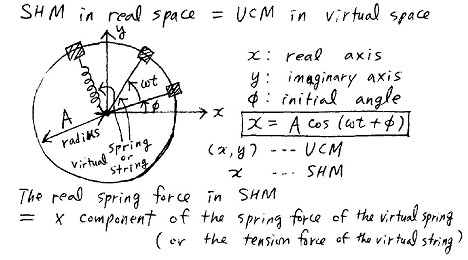 What do we learn from this comparison? That the
real world (the SHM) can be thought of as a “mere projection” or a “mere reflection”
of the virtual world (the UCM). [Mathematically, this
virtual world is none other than the plane of the complex numbers (“complex
plane”) where the
What do we learn from this comparison? That the
real world (the SHM) can be thought of as a “mere projection” or a “mere reflection”
of the virtual world (the UCM). [Mathematically, this
virtual world is none other than the plane of the complex numbers (“complex
plane”) where the ![]() axis is called the
imaginary axis.]
axis is called the
imaginary axis.]
One note about the word phase. The phase of the Moon is determined by the angle of its circular motion around the Earth. So, it should not surprise you that physicists use words phase and angle interchangeably.
Mechanical energy in a SHM
We already know that the total
mechanical energy in a SHM is conserved, since the spring force is a
conservative force. One can check this explicitly. The kinetic energy
is ![]() .
In the last step,
.
In the last step, ![]() has
been used. The potential energy is
has
been used. The potential energy is ![]() .
To summarize
.
To summarize
|
|
|
(15.7) |
Using the well-known
trigonometric identity, ![]() (here
(here
![]() is
just a dummy symbol; you can replace it with any other symbol), we get
is
just a dummy symbol; you can replace it with any other symbol), we get
|
|
|
(15.8) |
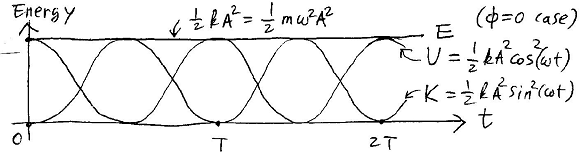 Note that
Note that ![]() is the maximum displacement,
which occurs at turning points where
is the maximum displacement,
which occurs at turning points where ![]() ,
and
,
and ![]() is
the maximum speed, which occurs at the bottom of the potential well at
is
the maximum speed, which occurs at the bottom of the potential well at ![]() .
.
Other examples of SHM
Around any stable equilibrium point, there is a simple harmonic motion, and so it is easy to come up with other examples of SHM. [In the following examples, we will be considering real circular motions with small amplitudes as SHMs. These circular motions are clearly different from the virtual circular motions discussed above. These real circular motions are non-uniform circular motions and they are restricted to a small part of circle.]
Note that, as in the example of a
simple pendulum bob (LN 12), the potential function can be a function of angle,
e.g. ![]() ,
instead of a linear coordinate such as
,
instead of a linear coordinate such as ![]() . In that case what is the
meaning of
. In that case what is the
meaning of ![]() ?
It is the torque (
?
It is the torque (![]() ).
Recall that the potential energy is defined as work done against a conservative
force. Work in the case of rotational motion is given by
).
Recall that the potential energy is defined as work done against a conservative
force. Work in the case of rotational motion is given by ![]() . Thus,
. Thus, ![]() (the minus sign means work done against
the force), and so for a rotational motion we get
(the minus sign means work done against
the force), and so for a rotational motion we get
|
|
|
(15.9) |
|
|
|
(15.10) |
Note the subtle difference in
notation here. We are using ![]() (kappa) not
(kappa) not ![]() here. These equations are the
complete rotational analog of Eqs. (15.1) and (15.2), and thus it follows that
here. These equations are the
complete rotational analog of Eqs. (15.1) and (15.2), and thus it follows that ![]() will satisfy
will satisfy
|
|
|
(15.11) |
It
is important not to be confused by the symbols here. [Keep
in mind that any symbol is just a name, and it is what you define it to be.] Here, ![]() is doing a SHM. Its phase is
is doing a SHM. Its phase is ![]() , which is the angle in the
virtual space, and this phase is distinct from the physical angle,
, which is the angle in the
virtual space, and this phase is distinct from the physical angle, ![]() , of the real space. Note that
in this LN we are careful not to call the argument inside the cosine function (
, of the real space. Note that
in this LN we are careful not to call the argument inside the cosine function (![]() ; the phase)
; the phase) ![]() since that would amount to using
the same symbol again to mean a different thing. Note also that here
since that would amount to using
the same symbol again to mean a different thing. Note also that here ![]() is an angular amplitude.
is an angular amplitude.
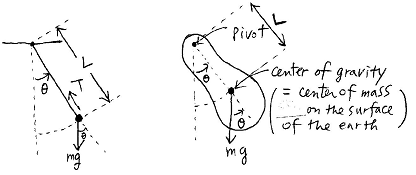 Simple pendulum and physical
pendulum The
diagram shows a simple pendulum (mass on a massless rod or string) and a
physical pendulum, each of total mass
Simple pendulum and physical
pendulum The
diagram shows a simple pendulum (mass on a massless rod or string) and a
physical pendulum, each of total mass ![]() . It is easy to see that the
only source of non-zero torque is the gravitational force (the tension force is
anti-parallel to the position of the mass and thus gives a zero torque), and
the torque is given by
. It is easy to see that the
only source of non-zero torque is the gravitational force (the tension force is
anti-parallel to the position of the mass and thus gives a zero torque), and
the torque is given by ![]() (the
(the
![]() sign
means that the direction of
sign
means that the direction of ![]() is into the paper, while the
positive direction of
is into the paper, while the
positive direction of ![]() is
out of the paper). The equation of motion is then
is
out of the paper). The equation of motion is then
|
|
|
(15.12) |
In general this equation of
motion is not solvable, and is different in form from Eq. (15.4). But, for small ![]() (in radians),
(in radians), ![]() ,
and so we have, for small oscillations of a pendulum (simple or physical),
,
and so we have, for small oscillations of a pendulum (simple or physical),
|
|
|
(15.13) |
Comparing this equation to Eqs. (15.3) and (15.4), we can thus conclude that ![]() will show a SHM, as long as
will show a SHM, as long as ![]() remains small, with the angular
frequency
remains small, with the angular
frequency
|
|
|
(15.14) |
For the simple pendulum, ![]() and
so
and
so
|
|
|
(15.15) |
 Torsional oscillator If you twist a thin wire, then it
has a tendency to go back to its natural state. In this case, the rotational
analog of Hooke’s law, Eq. (15.10), applies. This torque,
Torsional oscillator If you twist a thin wire, then it
has a tendency to go back to its natural state. In this case, the rotational
analog of Hooke’s law, Eq. (15.10), applies. This torque, ![]() , is equal to
, is equal to ![]() ,
where
,
where ![]() is
the rotational inertia of an object attached to the wire. Accordingly, the
object will go through a SHM, with
is
the rotational inertia of an object attached to the wire. Accordingly, the
object will go through a SHM, with
|
|
|
(15.16) |
Damped and driven oscillations
In real life, there is always a source of damping (e.g. friction) and also there can be a source of force that drives the oscillation. A child on a swing is a good example.
Without friction, the swing motion should be a SHM, driven only by the force of gravity, as in a simple pendulum or a physical pendulum, considered above. Just like in the examples studied in this lecture note, the frequency of this SHM is determined by the mass, the shape, and the surface gravity. This frequency is generally called the natural frequency. Any stable object has a SHM associated with it, and so has a natural frequency.
However, in reality, without pumping the oscillation of a swing dies down (damped oscillation) due to friction. A child can pump the swing, causing the amplitude increase (driven/forced oscillation). When a child pumps the swing, she knows instinctively to do this in a regular interval that corresponds exactly to the period of the swing motion itself. Namely the force/torque applied has the same period as the motion of the swing itself. When this occurs, the pumping is the most effective. The condition that the frequency of the driving force/torque is identical with the natural frequency of the oscillating object is called the resonance condition. Accordingly, a resonant oscillation refers to a driven/forced oscillation where the resonance condition is met. In general, the effect can be very pleasant (like the sound of a string amplified by the chamber of a violin or a guitar through the resonant oscillation of air in the chamber) or detrimental (like a wine glass shattered by a high pitch voice of an opera singer or, in fact, any curious student). For design of mechanical objects, such as cars and bridges, the resonant frequency is an important factor to consider – you want to avoid any environmental disturbances/vibrations driving your object with a resonant frequency!
The mathematics of damped and driven oscillations is beyond the scope of physics at this level. [Read 13.6 and 13.76 of text, for an optional glimpse.]