Lecture 13
Rotational Motion
 Acceleration in a circular motion
Acceleration in a circular motion
We
have discussed many examples of a circular motion so far: the Earth going
around the Sun, loop the loop roller coaster, and bug on a head, a pendulum
swing, etc. Except for the first example, each of these examples is a non-uniform
circular motion. What does it mean? It means that the speed (![]() ) is changing while the object is
making the circular motion, and so is the angular velocity (
) is changing while the object is
making the circular motion, and so is the angular velocity (![]() ).
).
Another name for circular motion is rotational motion.
If
one follows the mathematics of LN 5 ("fluxing our calculus muscles"),
this time treating ![]() as
a function of time, then one obtains the following. It is not essential to
know the math derivation. If you are a math wizard, please try it! Ask me if
you need help.
as
a function of time, then one obtains the following. It is not essential to
know the math derivation. If you are a math wizard, please try it! Ask me if
you need help.
|
|
|
(13.1) |
|
|
|
|
|
(13.2) |
||
Note
on the notation: I will continue to use ![]() instead of
instead of ![]() (as in the book or in the figure
on the right borrowed from the book). I find it more appropriate to use
(as in the book or in the figure
on the right borrowed from the book). I find it more appropriate to use ![]() for a constant radius.
for a constant radius.
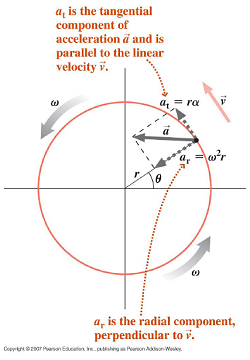
Here ![]() is
the radial acceleration. Another name for it is the centripetal acceleration (
is
the radial acceleration. Another name for it is the centripetal acceleration (![]() ),
which is exactly the same thing.
),
which is exactly the same thing. ![]() is
the tangential acceleration. What is
is
the tangential acceleration. What is ![]() ? It is the angular acceleration,
defined as
? It is the angular acceleration,
defined as
|
|
|
(13.3) |
Note
that a circular motion, or a rotational motion, is effectively a one
dimensional motion. In what sense? In the above figure, what is
changing? Only the
angle ![]() .
Only one number. So a one dimensional motion.
.
Only one number. So a one dimensional motion.
In
this sense, ![]() is
the angular displacement.
is
the angular displacement.
Recall
that when angle ![]() is
measured counter-clock-wise (CCW), then it is taken as positive. Likewise,
when angle
is
measured counter-clock-wise (CCW), then it is taken as positive. Likewise,
when angle ![]() is
measured clock-wise (CW), then it is taken as negative. So,
is
measured clock-wise (CW), then it is taken as negative. So, ![]() can, in principle, take any
value from
can, in principle, take any
value from ![]() to
to
![]() ,
just as the linear displacement
,
just as the linear displacement ![]() did
(LN 03). Lastly, recall that the SI unit of angle is radian (LN 01). [Why
do we bother to define
did
(LN 03). Lastly, recall that the SI unit of angle is radian (LN 01). [Why
do we bother to define ![]() from
from ![]() to
to
![]() ? Couldn't we just
define the range of
? Couldn't we just
define the range of ![]() as
as ![]() or
or
![]() or something like it,
stick to it, and be done with it? Yes and no. Strictly speaking, the answer
is yes, but practically speaking, it is much more convenient to define angle
from
or something like it,
stick to it, and be done with it? Yes and no. Strictly speaking, the answer
is yes, but practically speaking, it is much more convenient to define angle
from ![]() to
to ![]() .
If we choose to do the latter, then the motion of the Earth going around the
Sun will be starting from a certain value of
.
If we choose to do the latter, then the motion of the Earth going around the
Sun will be starting from a certain value of ![]() (call
that
(call
that ![]() ) and then the
) and then the ![]() value
increasing steadily and indefinitely. If we had restricted the
value
increasing steadily and indefinitely. If we had restricted the ![]() value
range to a finite range of
value
range to a finite range of ![]() , then the same motion
will involve a discontinuous jump of the
, then the same motion
will involve a discontinuous jump of the ![]() value
once every year. This is very inconvenient, mathematically speaking.]
value
once every year. This is very inconvenient, mathematically speaking.]
Constant angular acceleration motion
Given that ![]() is the angular displacement, the
1D kinematics machinery of LN 03 and related book parts can be used with just
the change of names. In
1D kinematics, we talked about velocity (
is the angular displacement, the
1D kinematics machinery of LN 03 and related book parts can be used with just
the change of names. In
1D kinematics, we talked about velocity (![]() , acceleration (
, acceleration (![]() ), given the displacement vector
), given the displacement vector ![]() . In constant angular
acceleration motion, we talk about angular velocity (
. In constant angular
acceleration motion, we talk about angular velocity (![]() ), angular acceleration (
), angular acceleration (![]() ), given the angular displacement
vector
), given the angular displacement
vector ![]() .
Thus for constant
angular acceleration
.
Thus for constant
angular acceleration ![]() ,
,
|
|
|
(13.4) |
|
|
|
(13.5) |
Here,
the quantity ![]() corresponds
to the average angular velocity (
corresponds
to the average angular velocity (![]() )
for time 0 to
)
for time 0 to ![]() .
.
Examples 10.1 and 10.2 of the textbook should be mastered.
Rotational Inertia
So far, for the most part, we have reduced a physical object with size and shape (such as an apple dropped, a base ball tossed up, a package delivered from an airplane, etc.) to a mere point. How is this possible? The answer is that it is not when rotational motions are involved.
Suppose
you consider a rotational motion of an object around a certain axis. The
following two forms of the definitions of the rotational inertia (![]() ) can be viewed as essentially
the same, since, after all, the integration is just a summation over many many
little pieces.
) can be viewed as essentially
the same, since, after all, the integration is just a summation over many many
little pieces.
|
|
|
(13.6) |
Here, ![]() (or
(or
![]() )
is the mass of each little piece ("mass element") that is summed
over, and
)
is the mass of each little piece ("mass element") that is summed
over, and ![]() (or
(or
![]() )
is the distance from the rotational axis to the mass element.
)
is the distance from the rotational axis to the mass element.
What is the meaning of the rotational inertia?
As a
brief digression, let us recall that in ![]() ,
,
![]() is
called the inertial mass (LN 07). What does it mean? If you hit a
baseball with a baseball bat, then the two exchanges forces that are equal in
magnitude by Newton's 3rd law. However, since the baseball is much lighter, it
is accelerated much more since the acceleration vector is inversely
proportional to the mass,
is
called the inertial mass (LN 07). What does it mean? If you hit a
baseball with a baseball bat, then the two exchanges forces that are equal in
magnitude by Newton's 3rd law. However, since the baseball is much lighter, it
is accelerated much more since the acceleration vector is inversely
proportional to the mass, ![]() .
Because of this, right after the collision, the baseball can move extremely
fast, while the bat does not have any speed nearly that fast. That is, the
greater the inertial mass, the harder to accelerate.
.
Because of this, right after the collision, the baseball can move extremely
fast, while the bat does not have any speed nearly that fast. That is, the
greater the inertial mass, the harder to accelerate.
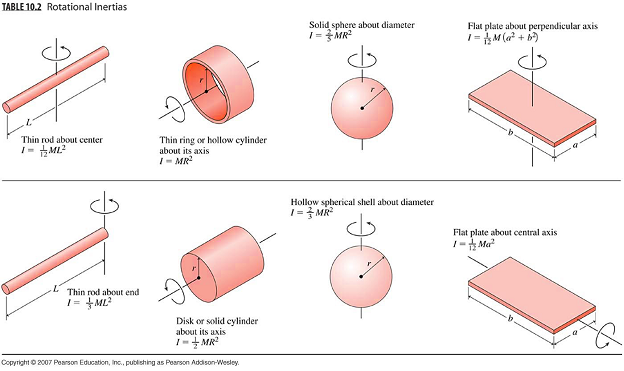
The rotational inertia is an equivalent concept in a rotational motion. It is easy to rotate a mass near the axis, while it's harder to do so when the mass is away. Think about a figure skater spinning, while her body is coiled up (fast rotation) or her arms and legs are extended (slow rotation). Or an Olympic diver who coils up (fast rotation) or stretching (slow rotation) before entering water.
Here are some typical geometries and their rotational inertia. You may need to look these up when you do problems. All these formulas can be derived using the multivariable calculus using the above definition, but we won't spend our time on that.
Torque
What is
torque? You may have heard about this when you were researching for a car to
buy. The reason why
we define it is because, for a rotational motion, it is often much more
convenient to talk about the torque, ![]() ,
instead of the force. It is defined as
,
instead of the force. It is defined as
|
|
|
(13.7) |
Here ![]() is
the position vector at which the force
is
the position vector at which the force ![]() is
applied, and
is
applied, and ![]() is
the angle between the two vectors. For the definition of the vector product,
refer to LN 09.5. Recall that the direction of the vector
is
the angle between the two vectors. For the definition of the vector product,
refer to LN 09.5. Recall that the direction of the vector ![]() is
determined by rotating the first vector (
is
determined by rotating the first vector (![]() )
towards the second vector (
)
towards the second vector (![]() ),
and applying the right hand rule.
),
and applying the right hand rule.
As we will see, the net torque is the cause of an angular acceleration, just as the net force is the cause of an acceleration.