Lecture 6
Reference frame and projectile motion
Reference frame
We have
already used reference frames, and the importance of them cannot be
over-emphasized. To describe motions, we use a spatial coordinate system to
quantify positions in space. This coordinate system is called a reference
frame. Since the position vector (![]() ),
the starting point of kinematics, cannot even be defined without a
reference frame, one can immediately recognize the importance of the reference
frame. In general, the best reference frame is the one that makes the
description of the motion of interest as concise as possible. Often this requires
the choice of a moving reference frame.
),
the starting point of kinematics, cannot even be defined without a
reference frame, one can immediately recognize the importance of the reference
frame. In general, the best reference frame is the one that makes the
description of the motion of interest as concise as possible. Often this requires
the choice of a moving reference frame.
The reference frame of someone/something means a reference frame in which that someone/something is at rest. For instance, the reference frame of a runner means a coordinate system whose origin is moving exactly like the runner, and the reference frame of an air current means a coordinate system whose origin is moving exactly like the air current. In these usages, the expression “reference frame” can be replaced by the expression “rest frame.”
Example
1. On a
straight road, you are driving in a car A at velocity 40 mph. There is a car B
in front of you, and the distance between that car and your car is increasing
at 20 mph. In your reference frame, what is the velocity of car B (call this ![]() )?
What is the velocity of your car A in the reference frame of car B (call this
)?
What is the velocity of your car A in the reference frame of car B (call this ![]() )?
In the reference
frame of the road, what is the velocity of car B (call this
)?
In the reference
frame of the road, what is the velocity of car B (call this ![]() )
and the velocity of car A (call this
)
and the velocity of car A (call this ![]() )?
)?
Solutions: From your point of view, car B
moving at 20 mph, so ![]() =
20 mph. On the other hand, the person in car B will see your car as moving
backwards at the same speed, and
=
20 mph. On the other hand, the person in car B will see your car as moving
backwards at the same speed, and ![]() mph.
mph.
![]() was
given as 40 mph. Since car B is going faster by 20 mph,
was
given as 40 mph. Since car B is going faster by 20 mph, ![]() mph.
mph.
Simple
as it is, this example points to a very valuable vector relation: ![]() .
This relation is immediately generalized to any dimensions:
.
This relation is immediately generalized to any dimensions:
|
|
|
(6.1) |
This
relation, valid for any
three objects A,B,R in any type of motion, can be read as: the
velocity of the object B in the reference from of A is the velocity of the
object B in the reference frame of R minus the velocity of the object A in the
reference frame of R. Or, since ![]() ,
this equation can be re-written as a sort of “chain-rule” for velocity:
,
this equation can be re-written as a sort of “chain-rule” for velocity:
|
|
|
(6.2) |
 Relative velocity
Relative velocity
![]() is
also defined as a relative velocity: it is the velocity of B relative to A.
is
also defined as a relative velocity: it is the velocity of B relative to A.
Examples 3.2 of the text should be mastered.
Example
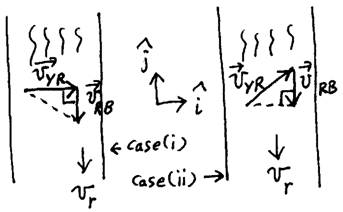
2. A straight river
(R) is flowing at 0.9 m/s towards south. You (Y) can swim as fast as 1.2 m/s.
You need to cross the river to get to the other bank (B). In one scenario (i)
you decide to swim east within the river’s reference frame, and in the other
scenario (ii) you decide to swim east within the bank’s reference frame.
Calculate the relative velocity vector ![]() and
the speed
and
the speed ![]() in these two cases.
in these two cases.
Solutions: The key thing to notice in this problem is that the
swimming ability of a person determines the magnitude of the velocity of the
person relative to the river. This means ![]() m/s.
[Note
that a similar consideration applies to airplanes flying in air current.] Let us take the coordinate system so that the x axis
is pointing east and the y axis is pointing north. Then,
m/s.
[Note
that a similar consideration applies to airplanes flying in air current.] Let us take the coordinate system so that the x axis
is pointing east and the y axis is pointing north. Then, ![]() ,
where
,
where ![]() m/s.
This equation, along with
m/s.
This equation, along with ![]() and
and ![]() m/s,
gives enough information to solve the problem (see figure). Case (i):
m/s,
gives enough information to solve the problem (see figure). Case (i): ![]() m/s. Thus,
m/s. Thus, ![]() m/s.
m/s.
![]() m/s.
Case (ii):
m/s.
Case (ii): ![]() m/s
= 0.8
m/s
= 0.8 ![]() m/s.
[So,
which is the faster way to cross the river?]
m/s.
[So,
which is the faster way to cross the river?]
Constant acceleration problem
The
following solutions are valid in any dimensions, due to the fact taking the
derivative of a vector can be done component-wise as shown in Equation (4.16).
When the acceleration ![]() is
constant,
is
constant,
|
|
|
(6.3) |
|
|
|
(6.4) |
|
|
|
(6.5) |
The above equations are direct generalizations of Equations (3.1) through (3.3), and can be readily proven component-wise using them.
Examples 3.3 of the text should be mastered.
Projectile motion
Remember
that “free fall” motions are defined as motions caused by the gravitational
force alone. Projectile motions are defined as free fall motions with the
constant downward surface gravity with magnitude = ![]() 9.8
9.8
![]() .
Then, the projectile motion is a constant acceleration problem with
.
Then, the projectile motion is a constant acceleration problem with ![]() ,
if we take the y axis to point up. Assuming the initial position
,
if we take the y axis to point up. Assuming the initial position ![]() and
the initial velocity
and
the initial velocity ![]() ,
the above solutions (6.3) and (6.4) can be expressed in the
following component-wise fashion:
,
the above solutions (6.3) and (6.4) can be expressed in the
following component-wise fashion:
|
|
|
(6.6) |
|
|
|
(6.7) |
|
|
|
(6.8) |
|
|
|
(6.9) |
These equations should be understood as follows. (1) The motion along the x axis and the motion along the y axis are independent. (2) The motion along the x axis is a constant velocity motion (due to no acceleration in that direction). (3) The motion along the y axis is a constant acceleration motion.
Note
that ![]() is
a linear function of
is
a linear function of ![]() ,
(i.e. in the form of
,
(i.e. in the form of ![]() )
and thus
)
and thus ![]() is
a linear function of
is
a linear function of ![]() .
On the other hand
.
On the other hand ![]() is
a quadratic function of
is
a quadratic function of ![]() (i.e.
in the form of
(i.e.
in the form of ![]() ).
It then follows that
).
It then follows that ![]() is
a quadratic function of
is
a quadratic function of ![]() ,
and thus the trajectory of a projectile motion, i.e.
,
and thus the trajectory of a projectile motion, i.e. ![]() as a function of
as a function of ![]() , is a parabola. [For
advanced students: in fact, we have just proved that the trajectory of any
non-zero constant acceleration motion in 2D is a parabola.] Recall that we discussed a
uniform circular motion in the previous lecture. Obviously a circle is not a
parabola, and thus it follows that a circular motion is not a projectile
motion! Why not? It is because the acceleration vector is not constant
for a circular motion, as we learned in (5.11).
, is a parabola. [For
advanced students: in fact, we have just proved that the trajectory of any
non-zero constant acceleration motion in 2D is a parabola.] Recall that we discussed a
uniform circular motion in the previous lecture. Obviously a circle is not a
parabola, and thus it follows that a circular motion is not a projectile
motion! Why not? It is because the acceleration vector is not constant
for a circular motion, as we learned in (5.11).
This is the end of the theory of projectile motions. Note that the text lists more equations. However, equations (3.14) and (3.15) should NEVER be used … without showing the derivation. As we shall see below, they really aren’t necessary if you know how to apply the above four equations.
One
piece of information that is good to remember about a projectile motion is
this: the time to reach the maximum height and the maximum height are
determined completely by one parameter ![]() ,
the y component of the initial velocity. Why? It is for the same reason that the initial
speed determined the hang time and the maximum height in the “foul ball”
problem (HW). In other words, Equations (6.8) and (6.9) have slightly different symbols
than equations that we dealt with in LN 3, but otherwise they are identical! We
know how to solve them! Doing just like the “foul ball problem” of homework
(or Example 5 of LN 3), we get
,
the y component of the initial velocity. Why? It is for the same reason that the initial
speed determined the hang time and the maximum height in the “foul ball”
problem (HW). In other words, Equations (6.8) and (6.9) have slightly different symbols
than equations that we dealt with in LN 3, but otherwise they are identical! We
know how to solve them! Doing just like the “foul ball problem” of homework
(or Example 5 of LN 3), we get
![]()
and
![]()
where ![]() is
the time it takes to reach the maximum height
is
the time it takes to reach the maximum height ![]() .
.
Example 3. At what angle should you throw a ball to make it go farthest? Assume that you can throw a ball at a certain maximum speed, regardless of direction. Ignore air resistance and the height of the person throwing the ball.
Solutions: Let us call the maximum speed
at which the ball is thrown, ![]() .
This is also the speed of the ball at
.
This is also the speed of the ball at ![]() . Assume that at a later time
. Assume that at a later time ![]() ,
the ball comes back to the ground. Ignoring the height of the person throwing
the ball,
,
the ball comes back to the ground. Ignoring the height of the person throwing
the ball, ![]() .
During this time, the displacement in x is given simply by
.
During this time, the displacement in x is given simply by ![]() .
How to maximize this range
.
How to maximize this range ![]() ? With the usual definition of
? With the usual definition of ![]() (cf. Figure on page 2 of LN 5),
(cf. Figure on page 2 of LN 5), ![]() and
and ![]() ,
and thus
,
and thus ![]() .
Using the well-known identity
.
Using the well-known identity ![]() ,
we get
,
we get ![]() .
To maximize this as a function of
.
To maximize this as a function of ![]() ,
,
![]() (or
45 degrees), which is the answer.
(or
45 degrees), which is the answer.
Example 3.4 of the text should be mastered.
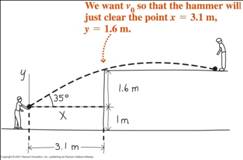 Example 4.
(Example 3.5 of text) A construction worker throws a tool like shown in the
figure. At what
speed show he throw the tool at, in order to clear the edge of the hole?
Example 4.
(Example 3.5 of text) A construction worker throws a tool like shown in the
figure. At what
speed show he throw the tool at, in order to clear the edge of the hole?
Solutions: Note that the time it takes for
the tool to reach the edge of the hole is ![]() where
where
![]() m.
During this time, we want to make sure that the change in
m.
During this time, we want to make sure that the change in ![]() is greater than
is greater than ![]() 1.6 m. The change in
1.6 m. The change in ![]() during time
during time ![]() is
given by
is
given by ![]() .
What we need to do is to set this equal to
.
What we need to do is to set this equal to ![]() , to solve for
, to solve for ![]() ,
where
,
where ![]() and
and
![]() .
Which means
.
Which means ![]() .
Note that all quantities except
.
Note that all quantities except ![]() are
given in this equation, so we calculate numbers: in the SI unit this equation
reads 2.171 – 70.176 /
are
given in this equation, so we calculate numbers: in the SI unit this equation
reads 2.171 – 70.176 / ![]() =
1.6. So,
=
1.6. So, ![]() =
=
![]() m/s = 11 m/s.
m/s = 11 m/s.
Example 3.6 of the text is optional. [Not because it is difficult.]